Proyecto original: Cámara de rayos cósmicos con móvil
Autores: Francisco Albiol y Alberto Corbi — IFIC CSIC-UV
Premio: CPAN (Centro Nacional de Física de Partículas, Astropartículas y Nuclear)
Licencia: código publicado con fines educativos y de divulgación científica
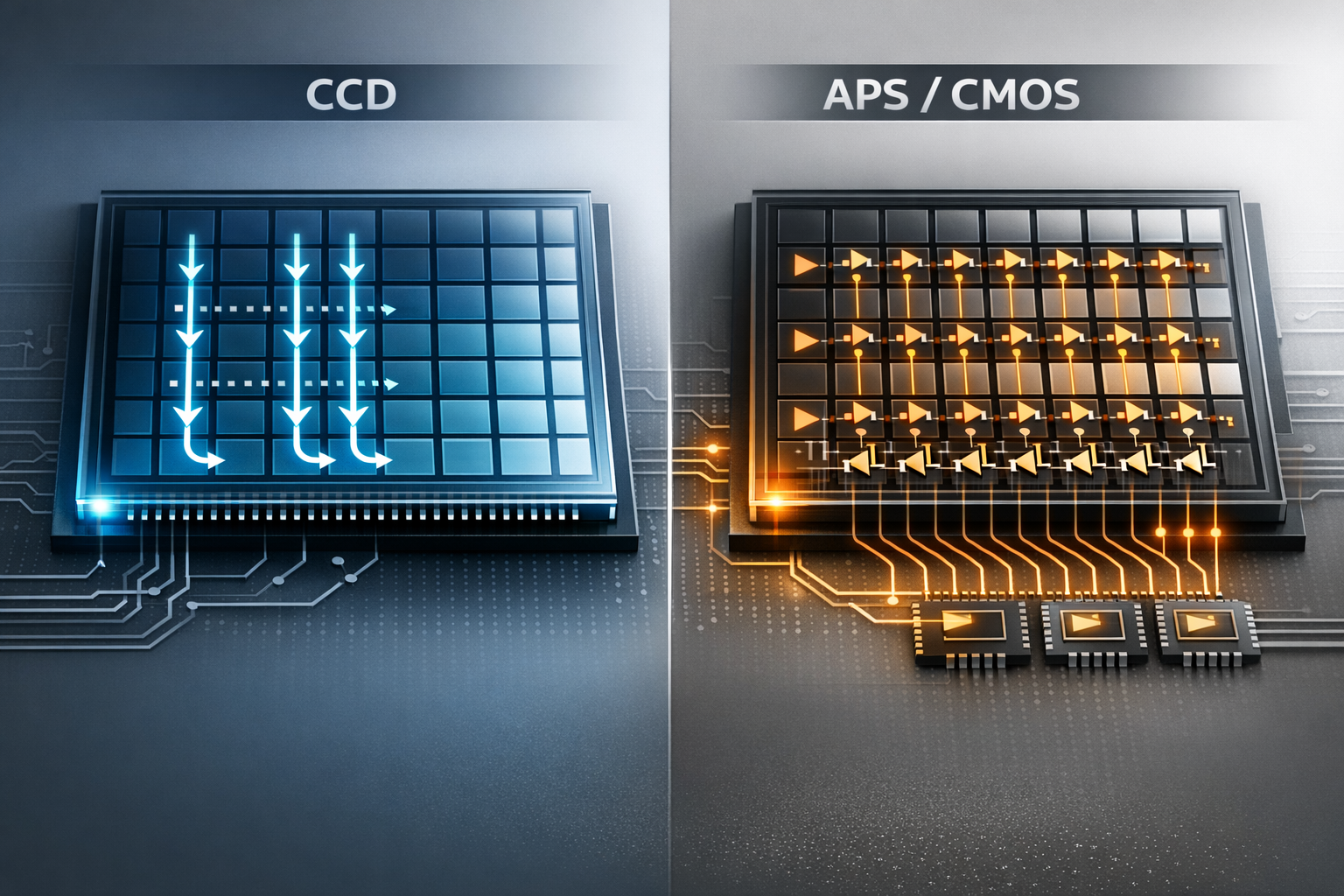
El detector se implementa en C++ sobre dos librerías multiplataforma: OpenCV para la captura desde cámara y CImg para el análisis de imagen píxel a píxel. Consulta Frameworks y herramientas para instalarlas en tu sistema.
La clase ccdRadiationDetector
La clase encapsula toda la lógica del detector: gestión de calibraciones, adquisición de frames, identificación de hits y construcción del histograma de energía depositada.
class ccdRadiationDetector {
public:
typedef std::map<int,int> mapcounter_t;
private:
// Bases de datos de calibración
cimg_library::CImg<float> *_histogram;
cimg_library::CImg<float> *_frame;
cimg_library::CImg<float> *_calibration;
cimg_library::CImg<float> *_noise;
cimg_library::CImg<float> *_badchannels;
// Parámetros estadísticos
size_t all_events;
size_t hits;
// Nombres de ficheros para persistencia de calibración
std::string _histogram_filename;
std::string _bighit_filename;
std::string _maskhit_filename;
std::string _calibration_filename;
mapcounter_t _badchannel_counter;
double _maxval;
static int mask_image(const cimg_library::CImg<float> &noise,
const cimg_library::CImg<float> &badchannels,
cimg_library::CImg<float> &frame,
float noise_sigmas,
mapcounter_t &badchannel_counter);
public:
ccdRadiationDetector(int device, const std::string &outputpath="");
~ccdRadiationDetector();
bool has_calibration() const;
void calibrate(int nframes=2048);
void adquire(float threshold, int nframes=200);
float modo_proporcional(float threshold, int nframes=200);
void show_histogram(int scale=1) const;
};
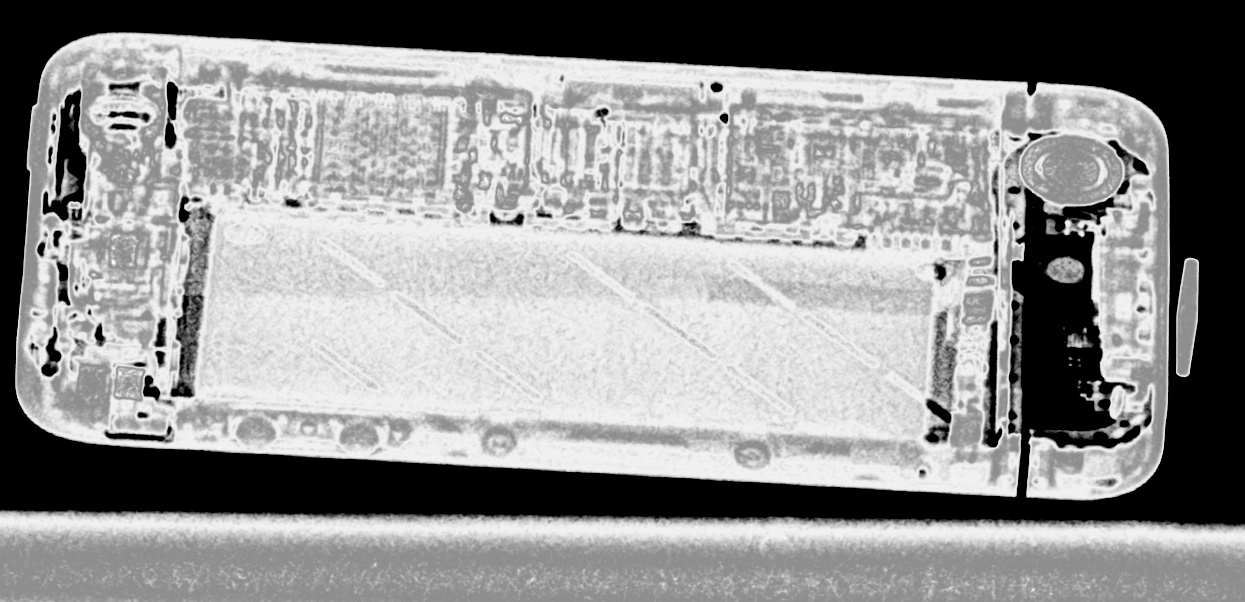
Calibración del sensor
La calibración acumula nframes imágenes oscuras para calcular píxel a píxel la media (pedestales) y la desviación estándar (ruido). Los canales con relación señal/ruido anormal se marcan como badchannels y se excluyen del análisis.
void ccdRadiationDetector::calibrate(int nframes)
{
int loopcount = nframes < 20 ? 20 : nframes;
cimg_library::CImg<> animage, noise2, value, gry;
_calibration->assign();
value.load_video("Default"); // Primera imagen
noise2 = value.get_sqr(); // Acumulación al cuadrado
for (int i = 1; i < loopcount; i++) {
animage.load_video("Default");
value += animage;
noise2 += animage.get_sqr();
}
(*_calibration) = (value) * (1. / float(loopcount)); // Media (pedestales)
{
_badchannels->assign(*_calibration);
_badchannels->fill(0);
// Desviación estándar píxel a píxel
(*_noise) = (noise2 - (value.mul(*_calibration))) / (loopcount - 1);
_noise->sqrt();
cimg_library::CImg<> stats = _calibration->get_stats();
cimg_library::CImg<> noisestats = _noise->get_stats();
const float variance_value = sqrt(stats(4));
float noise_level = (stats(1) - stats(0)) / variance_value;
// Marcar píxeles ruidosos como badchannels
cimg_foroff(*_badchannels, off) {
const float val = (*_calibration)(off);
const float noise = (*_noise)(off);
if (noise == 0 || (val / noise) > noise_level)
(*_badchannels)(off) = 1;
}
}
_badchannels->dilate(6, 6); // Extender badchannels 6 píxeles
// Propagar badchannels a los tres canales RGB
cimg_forXY(*_badchannels, x, y) {
if ((*_badchannels)(x,y,0) || (*_badchannels)(x,y,1) || (*_badchannels)(x,y,2)) {
for (int c = 0; c < 3; c++) {
(*_calibration)(x,y,c) = 0;
(*_noise)(x,y,c) = 0;
(*_badchannels)(x,y,c) = 1;
}
}
}
// Mostrar resultados de calibración
_calibration->display("Máscara de calibración (pedestales)");
_noise->display("Ruido de los canales");
_badchannels->display("Bad channels");
// Guardar calibración para reutilizarla
cimg_library::CImgList<float> calibration_list;
calibration_list.push_back(*_calibration);
calibration_list.push_back(*_noise);
calibration_list.push_back(*_badchannels);
calibration_list.save(_calibration_filename.c_str());
}
Programa de captura
Todos los programas se ejecutan en un directorio. Requieren OpenCV y CImg instalados.
// main_capture.cpp
// Creado por Kiko Albiol — IFIC CSIC, 13/09/14
// Captura continua y análisis de radiación
#include <iostream>
#include "opencvImageCapture.h"
int main(int argc, const char * argv[])
{
int device = 0;
if (argc > 1)
device = atoi(argv[1]);
std::cout << "Abriendo captura de video " << device << std::endl;
ccdRadiationDetector *rad_detector = new ccdRadiationDetector(device);
if (rad_detector->has_calibration() == false)
rad_detector->calibrate(800); // 800 imágenes para calcular ruido y pedestales
while (1) {
rad_detector->adquire(1000); // Adquiere 1000 imágenes, procesa y
// si encuentra señal la guarda en el histograma
}
}
Programa de visualización periódica del histograma
// main_display.cpp
// Creado por Kiko Albiol — IFIC CSIC, 13/09/14
// Muestra el histograma de energía acumulada
#include <iostream>
#include "opencvImageCapture.h"
int main(int argc, const char * argv[])
{
ccdRadiationDetector *rad_detector = new ccdRadiationDetector(0);
while (1) {
// Comprime el histograma en 16 partes para visualización
rad_detector->show_histogram(16);
}
}
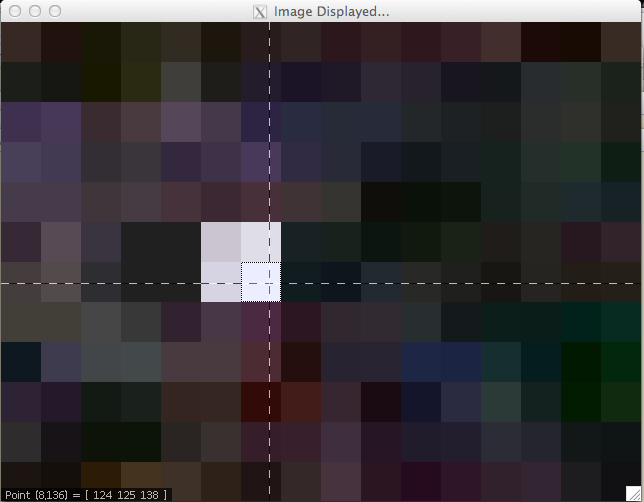
Visor de imagen simple
Útil para inspeccionar visualmente los ficheros .cimg generados por la calibración.
// main_viewer.cpp
// Creado por Kiko Albiol — IFIC CSIC, 13/09/14
// Visualizador de imágenes CImg
#include <iostream>
#include "CImg.h"
int main(int argc, const char * argv[])
{
if (argc < 2) {
std::cout << "[" << argv[0] << "] imagen.cimg" << std::endl;
return 1;
}
const std::string filename(argv[1]);
cimg_library::CImg<> animage(filename.c_str());
animage.display("Image Displayed...");
}
Consulta Procesado de la señal para ver la implementación de la función de identificación de hits.