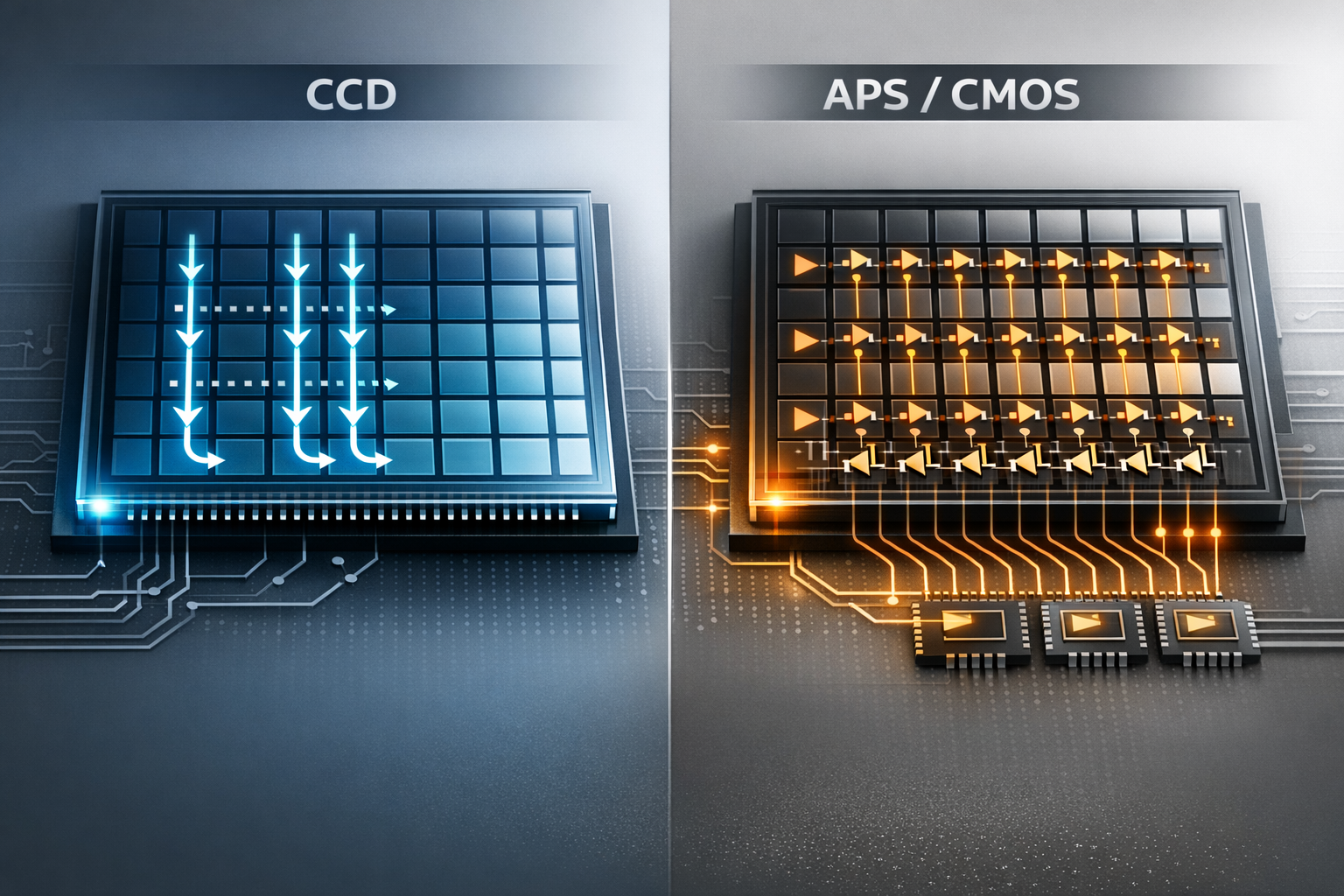
Un sensor de partículas es un dispositivo capaz de recolectar una mínima cantidad de carga y convertirla en señal. Esa carga se produce cuando una partícula ioniza el medio y excita electrones que se convierten directamente en señal, o bien en fotones que posteriormente se recolectan. Un sensor con esas características es exactamente un CCD — el sensor de una cámara.
La diferencia fundamental con los detectores de física de partículas profesionales es la sincronización: en la gran mayoría de aplicaciones hay que asignar cuándo se ha producido la señal. Para nuestro uso — medir la cantidad de radiación y su variación — eso no es relevante. El resultado es un detector de bajo coste que cualquiera puede construir.
Preparación del sensor

El primer paso es sencillo y decisivo: impedir la entrada de luz. Si el objetivo es detectar señal asociada a ionización, la cámara debe dejar de comportarse como cámara. Cubrimos la lente con cinta aislante negra. El sensor sigue siendo un detector de carga, pero ya no se dedica a construir imágenes del entorno: ahora solo registra la ionización que producen las partículas al atravesarlo.
Los astronautas de las misiones Apolo observaron algo similar cuando cerraban los ojos: sus ojos (un sensor de luz) eran capaces de detectar rayos cósmicos en el espacio.
Calibración: media y ruido del sensor
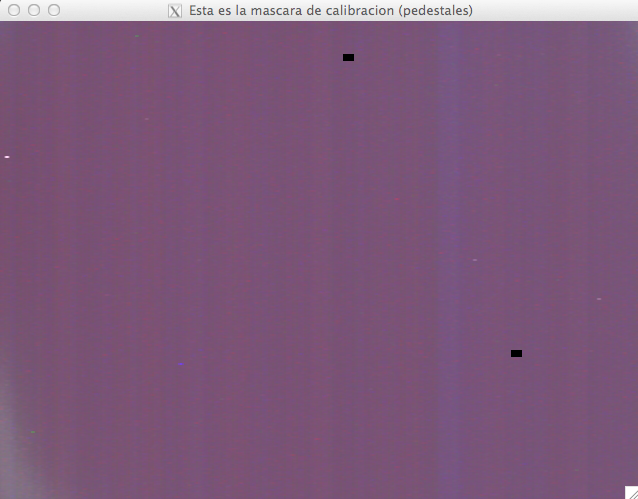
Antes de hablar de rayos cósmicos hay que conocer el propio sensor. Capturamos una serie de imágenes oscuras y construimos dos referencias:
- Mapa de pedestales: media de cada píxel
- Mapa de ruido: oscilación típica de cada píxel
Esas dos imágenes permiten distinguir entre el comportamiento normal del detector y posibles señales candidatas a evento real.
¿Cuántas imágenes son necesarias? Depende del ruido. En las cámaras empleadas el ruido es de apenas 4–8 unidades de ADC. En la cámara utilizada existen píxeles muy ruidosos que se marcan en una máscara de canales defectuosos (badchannels). Nosotros tomamos 800 imágenes.
¿Cada cuánto hay que recalibrar? Si asumimos que el detector funciona de forma constante en el tiempo, una vez es suficiente. Un CCD puede proporcionar 25–30 imágenes por segundo, así que 800 imágenes equivalen a unos 30 segundos de calibración.
¿Se pueden guardar las calibraciones? Sí, y se debería hacer para no perder tiempo de adquisición cada vez que el sistema arranca.
Identificación de eventos
Una vez calibrado el dispositivo, buscamos píxeles adyacentes con señal claramente por encima del ruido. A partir de ahí se etiquetan agrupaciones, se suma la energía depositada y se construyen histogramas.
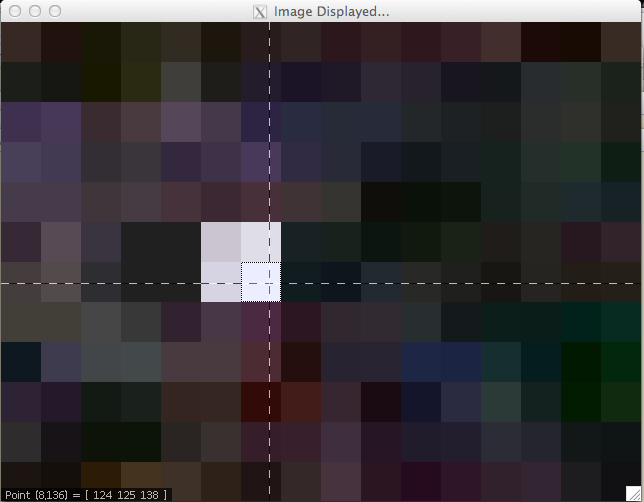
El umbral de señal/ruido que hemos empleado está entre 6.5 y 8 veces el ruido de referencia. Un evento típico afecta a 4 píxeles × 3 canales de color = 12 píxeles, como muestra la figura. Los valores van de 0 a 255 y la suma máxima por evento es aproximadamente 3000 (255 × 12).
De la teoría a la distribución medida
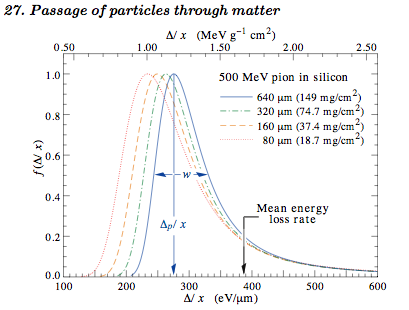
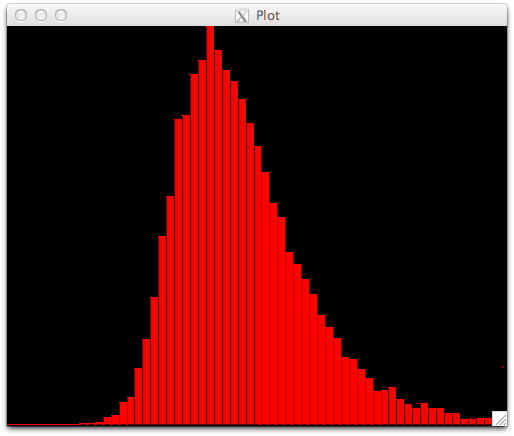
El resultado más valioso del experimento: incluso un sensor muy barato produce una distribución experimental que recuerda a la distribución de Landau esperada para la deposición de energía en silicio. Esa comparación entre curva teórica y curva medida resume el espíritu entero del proyecto.
Continúa en El software del detector para ver cómo se implementa todo esto en C++, o en Experimento de exposición a rayos X para ver el detector en acción con una fuente controlada.